With the efforts of the previous designers, the construction of the energy stone collection arena facilities is progressing smoothly. After successfully designing mission vehicles such as mining cars and dump trucks based on the base vehicle, the designers now need to complete the final task: lifting the energy stones from the warehouse to the energy center located at a high point in the arena.
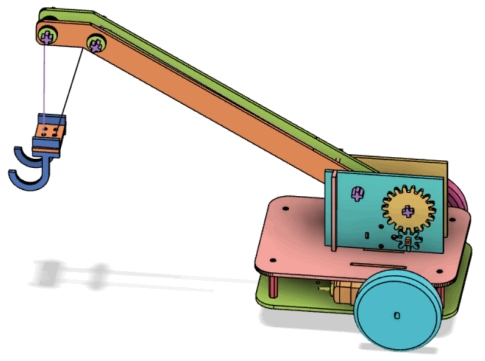
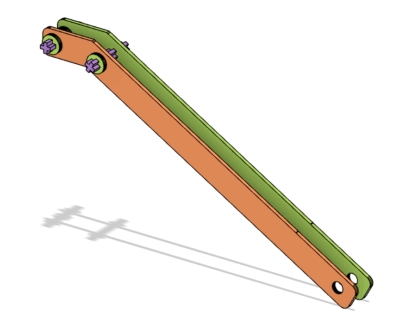
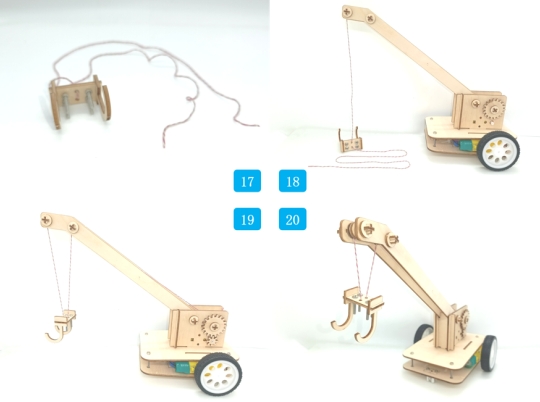
It’s time for our mighty Hercules—the amazing crane to make its appearance. Look at its long crane arm, thick cable, and gigantic hook that can easily lift energy blocks from the ground to a high position. Let’s take a look at how the designers accomplished this design task.
Determining the Design Plan
Analyzing the Work
By observing cranes in real life, we can see that they often work in ports, construction sites, and other locations. They are primarily used as large-scale mechanical equipment for lifting, handling, and hoisting heavy objects. Their working characteristics include the ability to continuously perform lifting, handling, and unloading of heavy loads. Cranes are also known as wheeled cranes, characterized by their flexibility in movement. In contrast, tower cranes are often seen in construction sites, used for building houses. Based on the requirements of this design task, young designers can imitate the structural composition of cranes to design a crane device capable of lifting energy blocks.
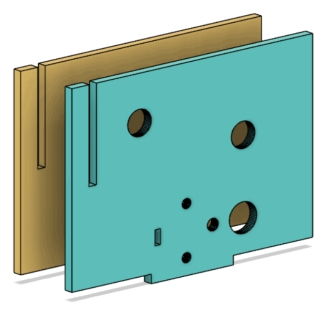
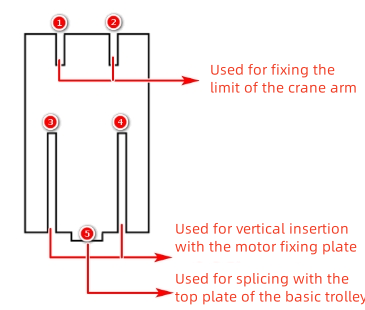
Before starting the design, let’s first analyze the crane’s structure. As mentioned earlier, its main features are the ability to lift, handle, and unload. The handling work can be done by the wheeled chassis, while the lifting and unloading actions require the boom. Therefore, when designing the crane model, the design can be divided into the vehicle structure that realizes the movement function and the lifting structural components that realize the lifting function.
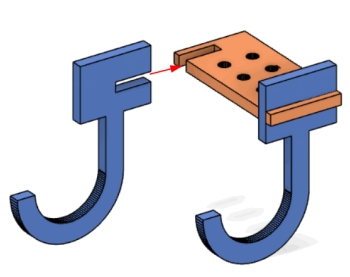
Since we have already designed and completed the basic vehicle chassis in previous chapters, for this chapter’s crane design, we only need to focus on designing the lifting structure. By designing corresponding mortise holes on the vehicle body, the lifting structure can be fixed onto the cart. Therefore, the lifting structural components are the focus of this chapter’s design.
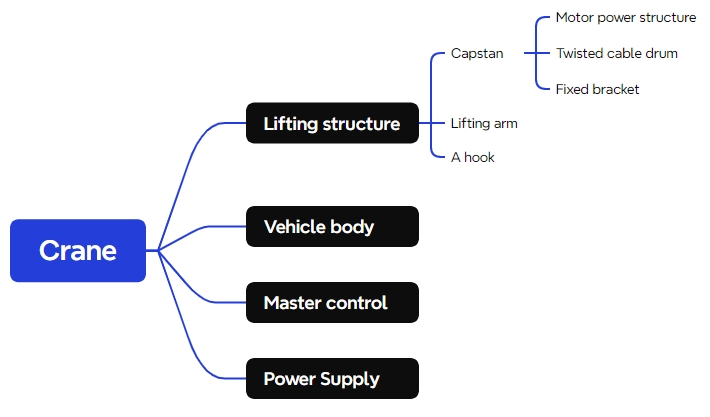
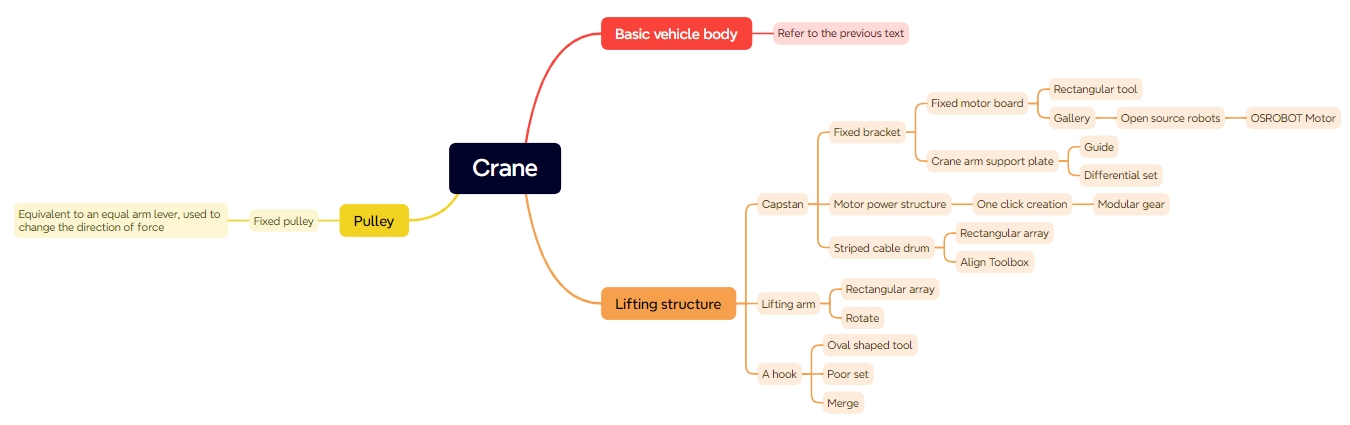
The following figure is a mind map for the crane’s design.








.png "laser cutter Globle") International
International
 United States
United States
 Brasil
Brasil
 Canada
Canada
 Costa Rica
Costa Rica
 Mexico
Mexico
 Česká
Česká
 Romania
Romania
 Polska
Polska
 Ireland
Ireland
 Italia
Italia
 Lietuva
Lietuva
 Россия
Россия Deutschland
Deutschland
 Britain
Britain
 Україна
Україна
 France
France
 Sverige
Sverige
 Norway
Norway
 Denmark
Denmark
 Ελλάδα
Ελλάδα
 Portugal
Portugal 한국
한국
 中国
中国
 中国香港
中国香港
 Israel
Israel
 中國臺灣
中國臺灣
 ジャパン
ジャパン India
India
 پاکستان
پاکستان پශ්රී ලංකා
پශ්රී ලංකා
 ประเทศไทย
ประเทศไทย Australia
Australia
 New Zealand
New Zealand
 South Africa
South Africa